


【2022年版】手の麻痺・回復への治療 16原則 /脳卒中/脳梗塞リハビリ/課題志向型/ロボット/再生医療/CI療法

また、STROKE LABではどのような治療方法を活用しているか?についてもお伝えします。
動画でわかりやすく視聴したい方は↓↓↓ https://youtu.be/_NhJn43UAaQ https://youtu.be/DLNEc6yDKSo
脳卒中後の手の回復 予後予測について
脳卒中後の約20%が廃用手、65~85%が部分的に回復すると推定され、実用手は5〜6%という報告もあります。
上肢の障害は、ADL活動の回復を妨げる主要障害の1つです。
このため、脳卒中の患者は上肢の機能回復を目指した定期的かつ効果的な治療を速やかに実施することが不可欠となります。
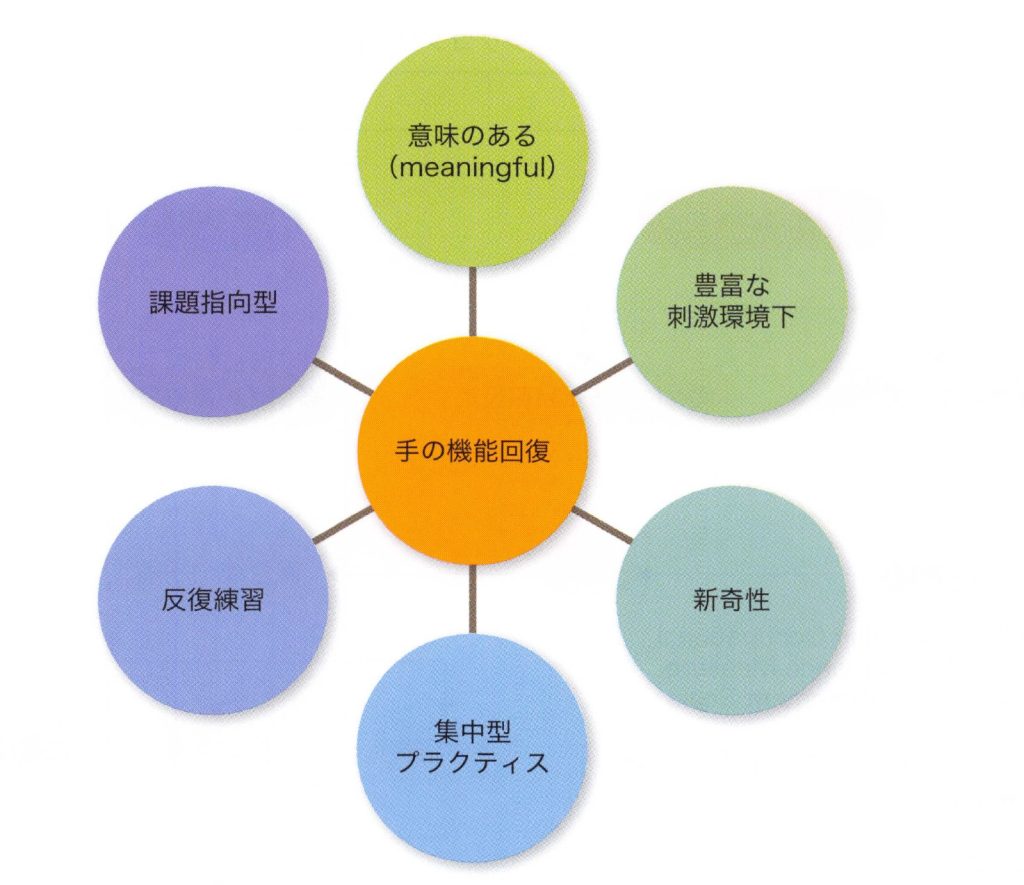
加え、脳卒中後の手の機能回復についてのエビデンスにおいて重要なテーマとして, 「意味のある」, 「課題指向型」, 「反復」, 「集中」, 「新奇性」, 「豊富な刺激環境下」などの要素が挙げられます。
今回はこのポイントには触れませんが、興味がある方は動画をご視聴ください。
金子唯史:脳卒中の動作分析,医学書院(2018)より
Oujamaaらによる2008年のレビューやPomeroyらによる研究では、脳卒中で損傷した上肢の治療法について様々な手法が紹介されています。
上肢と手のリハビリテーションに特化したものもあれば、より包括的な治療もあります。
今回は総説をお伝えします。
手の回復方法15選
①メンタルイメージトレーニング
メンタルイメージとは、「ある動作を意識的にイメージすること」であり、神経系の運動ニューロンの知覚閾値以下で活性化することです。
多くの神経画像研究により、タスクを実行している自分の姿(視覚イメージ)や、特に運動の体性感覚の結果を想像すること(運動イメージ)が、大脳皮質の特定の領域を活性化することが明らかにされています。
これらの手法により、視覚と体性感覚の内部入力が作られ、実行を伴わない運動計画のようなものが可能になります。
練習に精神的な運動を加えることで,上肢の運動能力の向上にプラスの効果があることを示すいくつかの研究があります。
STROKE LABでも自主トレなどで、セラピー時の感覚やドアノブを回すイメージで・・・など積極的に用います。
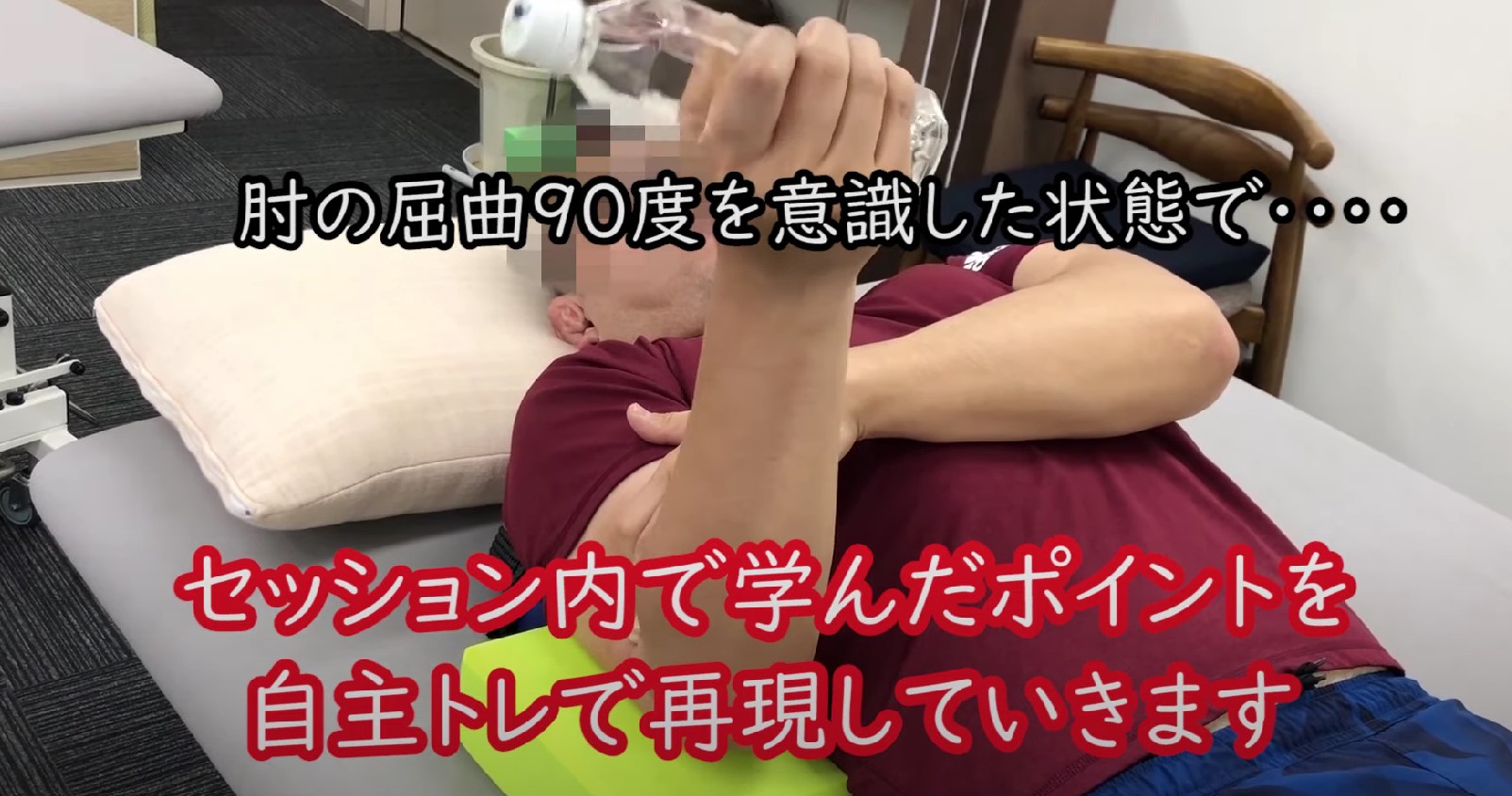
STROKE LABではセラピー中、自主トレでメンタルイメージは良く活用します。重心移動、関節運動などでイメージを取り入れることを大切にしています。
②触覚刺激、軟部組織のモビライゼーション、受動的運動ROM
触覚刺激と軟部組織モビライゼーションは、患者の注意を引きつける感覚的な刺激を与え、患側に向かわせる手法です。
受動的モビライゼーションは同様の効果を持つが、それに加えて、患者が感覚的な動きのパターンを作るように誘導することが大切です。
STROKE LABのモビライゼーション一例↓↓↓
STROKE LABでは熟練したスタッフによる感覚入力、軟部組織のモビライゼーションを提供します。家族様に受動的ROMをお伝えすることもあります。
③行動観察/ミラーセラピー
行動観察、ミラーセラピーは、療法士が行う特定の動作や作業、または体の正中線の高さに配置された鏡に映る非麻痺側の観察を通じて、患者は特定の回路を活性化する視覚的な運動入力を受け取る方法です。

ミラーセラピーの詳細↓↓

STROKE LABではミラーセラピーを介入時間で実施するというよりも、自主トレでお勧めすることはあります。簡単な箱、100円均一の鏡を段ボールに貼ることで作成することができます。
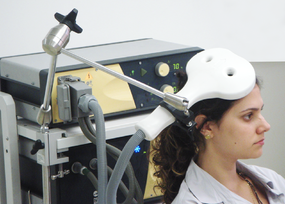
④反復経頭蓋磁気刺激法
反復経頭蓋磁気刺激(rTMS)は、刺激終了時にも運動野の興奮性に変化が生じ、刺激周波数に依存する非侵襲的な神経調節法です。興奮性を抑制する低周波(1Hz)の磁気刺激や、その下の大脳皮質の興奮性を高める高周波(10-50Hz)の刺激を頭皮上に放出することができます。
例えば、対側の大脳皮質を抑制し、同側の大脳皮質を刺激するような使い方ができる。しかし、rTMSは装置の価格が高く、高度に専門化した臨床センターで使用する必要があるため、患者への大規模な臨床使用の見通しが立っていない方法論です。
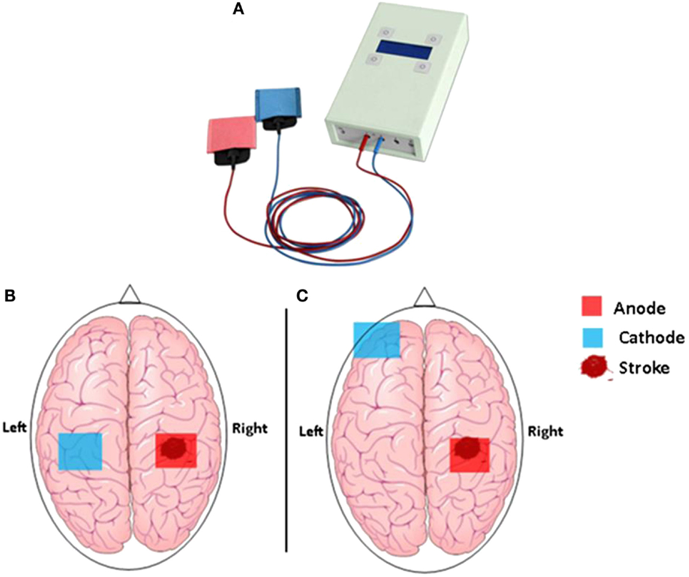
⑤経頭蓋直流刺激法
経頭蓋直流刺激法(TDC)も非侵襲的な手法のひとつで、装置が安価で使いやすい(家庭でも)ため、より有利といえます。TDCは、頭皮に装着した2つの電極間に流れる低強度の電流(1mAまたは2mA)を利用します。電極の極性によって、神経細胞はより興奮しやすくなったり、より興奮しにくくなったりするように分極されます。
TDCsの他の記事は↓↓↓

STROKELABでは、上記治療を他施設で実施し、その効果を身体からお伝えすることを努力しています。多くの論文でも電気刺激、磁気刺激に質の高いリハビリを組み合わせることを推奨しています。
上記のような脳の興奮を上げたり抑制させたりする方法は半球間抑制の概念に基づいています。半球間抑制に基づく回復の原則としてWardらは以下の5つのポイントを述べています。

手の回復のための5つのポイント
1.非麻痺側からの感覚入力を減らすこと
2.麻痺側からの感覚情報を増やすこと
3.麻痺側の中枢部からの感覚情報を減らすこと
4.障害部位周囲の脳の可塑性を促すこと (TMS(経頭蓋磁気刺激)やイメージングの利用)
5.障害部位と反対側の脳の活動を抑制すること(上記同じ)
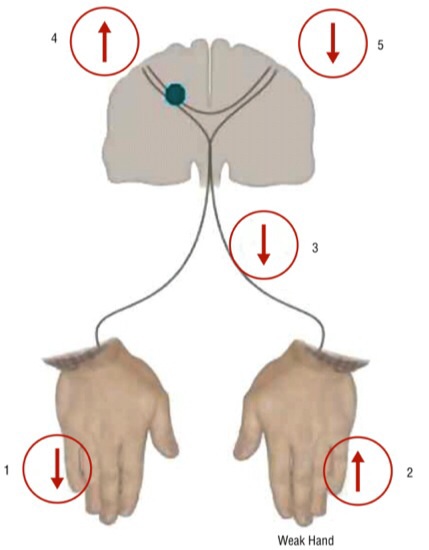
Mechanisms Underlying Recovery of Motor Function After Stroke|より引用
半球間抑制を是正させる臨床アイデア
1)セラピストには、麻酔を使用して非麻痺側に対して筋緊張を和らげたり、麻痺側の中枢部に対して麻酔を投与することはできません。しかし、セラピストは、非麻痺側での過剰な筋緊張や不器用さに対して、運動指示や言語指示、課題のコントロールなどの介入を行うことができます。
2)麻痺側の手に皮膚感覚だけでなく、筋からの情報や物品を活用した立体認知感覚などもサポートすることができます。特に手は、大脳皮質の支配領域が大きいため、介入が直接的に脳の活動に影響を与えやすいと考えられます。
3)上記の実験は、慢性期患者への中枢部に麻酔を打って末梢の動きが良くなることを紹介しています。ただ臨床では中枢部の低緊張な方もいます。その場合、抑制ではなく促通することで末梢の動きが改善する場合も多いのです。したがって、感覚情報を多く入れることが大切な患者もいるのではないでしょうか?
4・5)直接の影響は難しいですが、上記体性感覚以外にも、聴覚情報、視覚情報などを工夫して興奮や抑制などの活動に一部貢献できるかもしれません。
⑥静的スプリントと動的スプリント
静的(スタティックスプリント)や動的(ダイナミック)スプリントは、当初、痙縮の軽減や拘縮の発症を予防する目的で使用されていました。
しかし、2011年のレビューでは、一晩中や数日間連続してスプリントを装着しても、痙縮の軽減や拘縮の発症予防には効果がなく、逆にマイナス効果になることが示されています。
その主な理由は、スプリントを長期間維持すると手首の可動性が低下し、廃用を誘発し、その結果筋萎縮が起こりやすく、さらに、スプリントは受動的で神経可塑性や運動学習を刺激できない傾向がある、とされています。
次に、関節を動かすために追加の部品(バネ、糸、弾性体)を使用する動的スプリントがあります。
これは、制御された繊細な力を長時間軟部組織に与え、組織を引き裂くことなく組織のリモデリングを促進するためです。しかし、関節の損傷を防ぎ、自発的な運動を促しながら、どの程度の力を放出させるかは調整が難しいです。

STROKE LABではスプリントよりもポジショニングで可動性や緊張軽減を行うことを重要視しています。
参考記事↓↓↓
⑦薬物療法
運動野の神経伝達と興奮性を修正するために使用される薬物です。しかし、薬物の作用は、上記の他のタイプの治療のように大脳半球に特異的ではありません。

STROKE LABはかかりつけ医と連携しながら、薬(例えばボトックスなど)の効果などフィードバックしています。
⑧CI療法
CI療法は、患者が損傷した麻痺肢を使用しない傾向があるという考えから発展したものです。
この患肢の不使用は、病巣付近の神経興奮性の低下、動作の不成功に伴う継続的な負のフィードバック、対側皮質の興奮性上昇に伴う半球間相互作用の変化、等によって生じるものです。
CI療法は、運動皮質の活動のバランスをとることを目的とし、健側の活動を制限し(患者に手袋や包帯を装着してもらう)、患側の上肢・手を集中的に訓練します。療法士は、患者の能力に適したエクササイズを提案すると同時に、エラーが発生した場合には、フィードバックと励ましなどを提供する必要があります。
CI療法場面動画↓↓↓
CI療法記事↓↓↓

STROKE LABでは強制的な健側の固定は実施しませんが、自主トレやセラピーで非麻痺側に頼らない方法などを指示し、動画を提供することもあります。
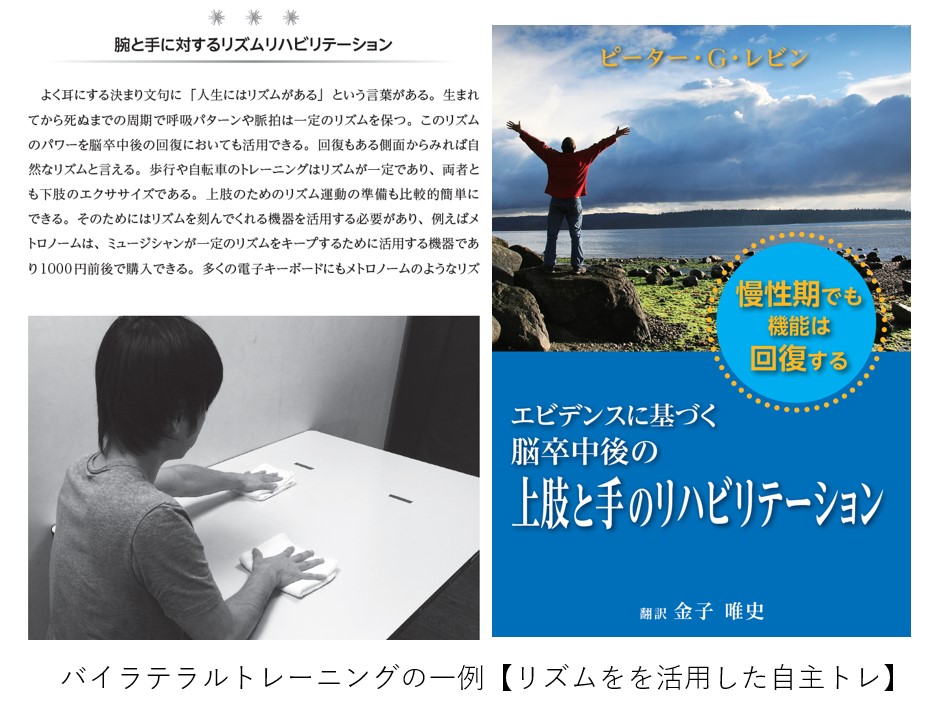
⑨バイラテラル・トレーニング(両側運動)
脳卒中患者では、両手作業中に両上肢を協調させる能力が部分的に保存されているため、両腕で同時に手を伸ばす、つかむなどの活動を実行することが含まれるこのタイプの介入になります。
この方法は、麻痺側筋群の運動を促進する運動システムの残存部位のおかげで、麻痺側手足による運動タスクのパフォーマンスを向上させることができると考えられています。
まだ明確なエビデンスはありませんが、障害が大きく、麻痺肢の運動時に対側運動野をより多く活動させる傾向がある患者さんほど、より大きな効果が得られると考えられています。両側性の訓練は、ロボット療法と組み合わせることができます。
バイラテラルトレーニングの詳細記事は↓↓

代表金子の翻訳書籍でもバイラテラルトレーニングを紹介しています。主に自主トレで活用します。非麻痺側を動員すると、麻痺側の出力が低下したり代償が強まる利用者様にはお勧めしません。
⑩機能的電気刺激(FES)、経皮的電気神経刺激(TENS)
これらは、筋肉を活性化し、感覚入力を発生させるために使用することができます。正常な運動は、繊細で複雑な筋の活性化パターンによって生み出されますが、TENSによって生み出される運動は粗大な運動になりやすい傾向があります。
FESは、特に肘、手首、伸筋指の機能的なタスクにおける活性化のレベルにおいて、随意運動の生成を促進することができる可能性があります。
しかし、外部からの低い電気強度で活性化されやすい運動ニューロンは、生理的な現象とは逆に、より全身を制御する筋の直径の大きなものであることが制限となります(二関節筋を中心とした粗大運動)。
したがって、外部からの刺激では、いわゆる「微細な動き」を活性化することが現状では不可能と言われています。
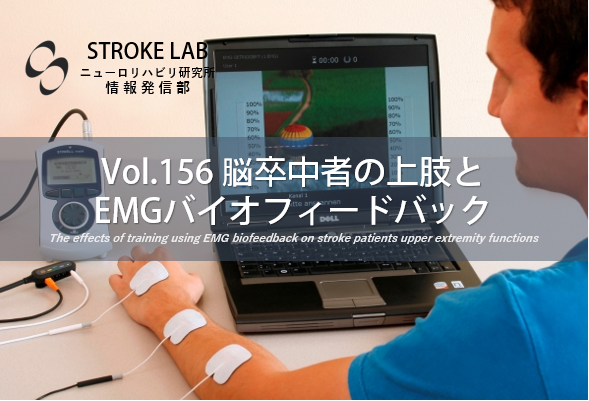
⑪筋電図(EMG)バイオフィードバック
表面筋電図を用いて筋肉の活性化の時間と強さを記録し、視覚と聴覚で患者さんにフィードバックする方法です。この手法の基礎となるニューロンメカニズムは明確にはわかっていませんが、最近の研究によると、バイオフィードバックは皮質活動のパターンを調節することが報告されています。
STROKE LABではエスパージのTENSを一部セラピーや自主トレで活用することはあります。自主トレには家庭用のオムロンマッサージ電気刺激などを提案することもあります。電気刺激は担当医に一度確認することを推奨しています。

⑫電気機械療法またはロボット支援療法
麻痺側上肢の運動を補助するために、さまざまな種類の装置が設計されています。
これらの技術により、正常に動ける場合に得られる感覚的なフィードバックを運動系に与えることができます。このようなフィードバックにより、患者は望ましい運動パターンの内部モデルを作成し、運動経路の興奮性を高めることができます。
ロボット療法は、フィードバックだけでなく、物によっては比較的安価に大量の治療を行うことができます。
初期のロボットは、患者の随意筋収縮に関係なく、一定のトルクで動作補助を行っていましたが、新型のロボットは、患者の随意運動の量を感知し、補助の程度を修正することができます。
多数の研究により、ロボットによる動作補助の効果は、日常生活動作、筋力、運動機能に関して、弱い結果から強い結果まで様々なものが報告されています。しかし、介入の「量」と効果の関係をより明確にするためには、さらなる研究が必要とされています。
STROKE LABでは、先ほどのマッサージ機器、電気機器など安価なものをご提案することはあります。
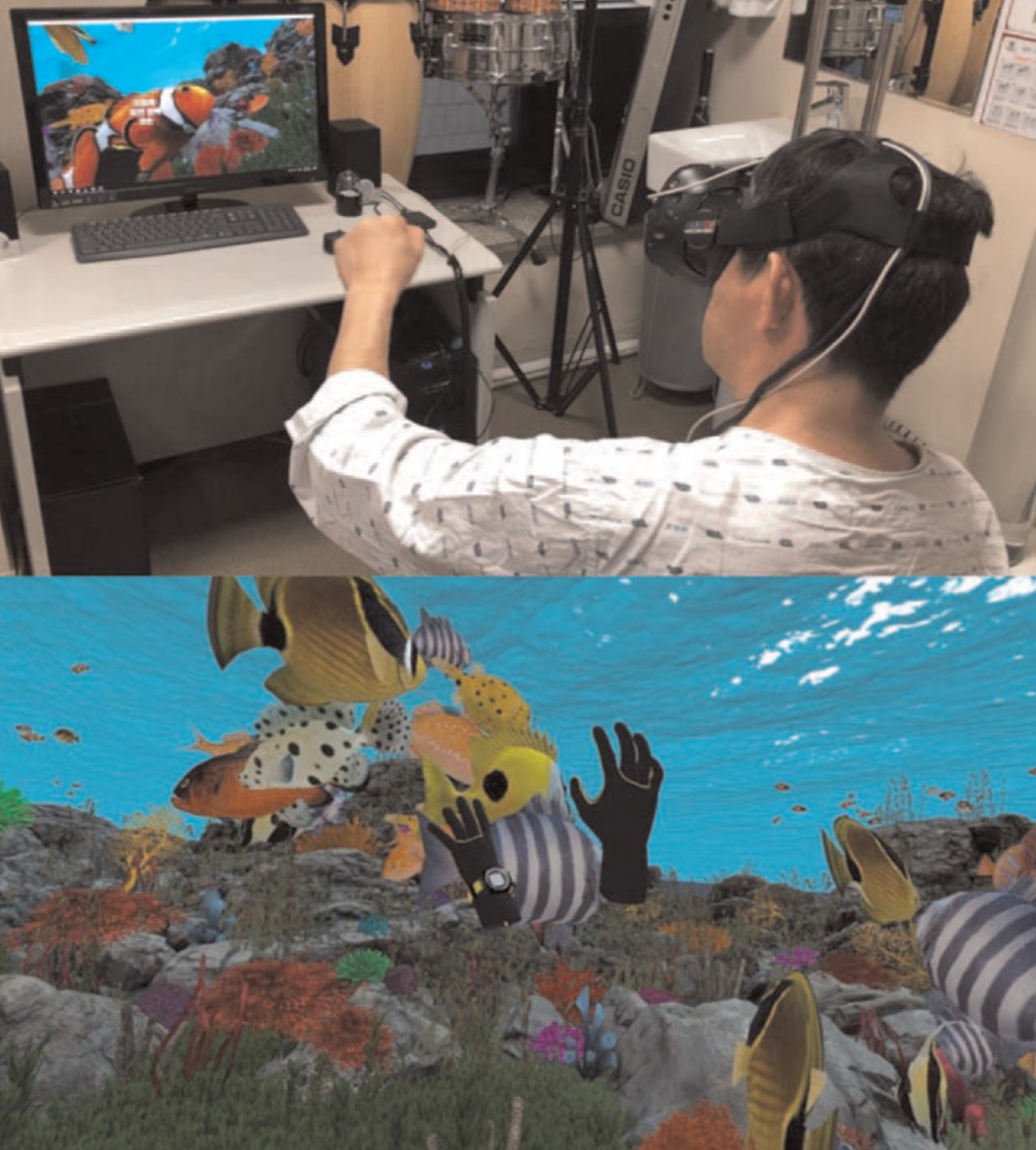
⑬バーチャルリアリティ(VR)
バーチャルリアリティは、患者が仮想空間に没入し、自分の体が動いている様子を見ながら、より繊細なフィードバックを得ることができます。ユーザーが受け取る視覚情報と運動中に行う動作との時間的な遅れを減らすために日々進化しています。
上肢の運動は、パフォーマンスに応じて難易度を調整することができ、治療が遊びの側面を持つため、患者のモチベーションも高くなります。ある研究では、2次元環境でのトレーニング(1日1時間、4週間)により、5人の慢性疾患患者の上肢機能が向上したことが示されています。
対照群は、バーチャルリアリティによる治療を受けなかった5人の患者で構成され、改善は見られませんでした。運動との組み合わせで効果が上がる可能性があります。
2021年のWookyung Parkらの報告では観念運動失行の症例に対するVR介入で効果が見られたことも報告されています。
STROKE LABでは直接的に仮想空間のセラピーは提供していません。近年はOculusのVRゴーグルやNreal Airなど注目の機器が増えています。まだリハビリに直結したコンテンツがないので、今後に期待です。

Efficacy of virtual reality therapy in ideomotor apraxia rehabilitation: A case report Wookyung Park 2021より引用
⑭課題指向型トレーニング
課題指向型トレーニングはリハビリテーションの中心的介入です。機能的な課題を繰り返し行うことで、機能や運動能力の大幅な向上が期待できます。
運動がパフォーマンスを向上させるのは、神経系が身体の状態を推定し、それを運動目標と統合する機会を繰り返し与え、調節された、漸進的な運動指令を出し、感覚フィードバックに基づいて運動出力を調節するためです。
課題指向型トレーニングの科学的根拠は、経験に依存する運動皮質の可塑性の原則に基づいています。
課題の重要な構成要素(例えば速度や距離)を 識別するように患者を誘導し、課題の要求を徐々に高めながら、これらの構成要素を少しずつ改善するごとに肯定的な言語フィードバックを与えることが不可欠になります。
この種の介入でも治療の「量」に関連したいくつかの有効性試験が実施され、0~20時間の運動の患者さんに比べて、20時間以上の運動の患者さんでは二重の効果が認められました。主に上肢に注意を向けることで、座ったまま遠くのものに手を伸ばしたり、コップを口に運ぶなどの随意運動ができるようにすることを目的としています。
最近の研究では、脳卒中発症直後から「代償動作」を避けながら運動を行うことが重要であることがわかりました。特に、慢性期の患者さんであっても、体幹の代償的な動きを避け、最小限にすることで、大きな改善が得られることがわかりました。
課題別トレーニングの目的は、技能、筋力、スピード、協調性、努力の調節の習得を促進することです。
STROKE LABのセラピーも筋や姿勢の細かな運動学習後に、課題指向型トレーニングを実施することが多いです。単純な動作の反復練習のみでは効果が薄いと考えています。
課題指向型トレーニングの一例↓↓↓

実際の課題指向型トレーニングによる変化動画↓↓↓
⑮ロボット技術
ロボットシステムを用いたリハビリテーションは、患者に量とトレーニング強度を提供し、特定の動作や機能的なタスクを繰り返し練習させることができます。実際に、脳卒中後の皮質の再編成は、まさにこの繰り返しによってもたらされます。
過去30年間、脳卒中患者のリハビリテーションの分野では、様々な技術の中で、上肢の運動機能回復のためのロボットシステムの実験に研究の発展が向けられてきました。
当初は、特に近位四肢に注目が集まり、肩や肘の機能回復を目的としたロボットが開発されました。しかし、近年では、手首や指など上肢の遠位部に対する補助・訓練用のロボットツールの開発が盛んになってきています。
上肢遠位端への二次的な関心は、人間の手が複雑で多様であるために、ハンドトレーニング用のロボットシステムを設計することがかなり困難であることにも起因しています。手首から肩までの腕の自由度が7であるのに対し、指と親指の自由度は21もあるのです。
手の運動回復に使われるロボットは、基本的に2種類に分かれます。①エンドエフェクター装置 ②外骨格装置です。
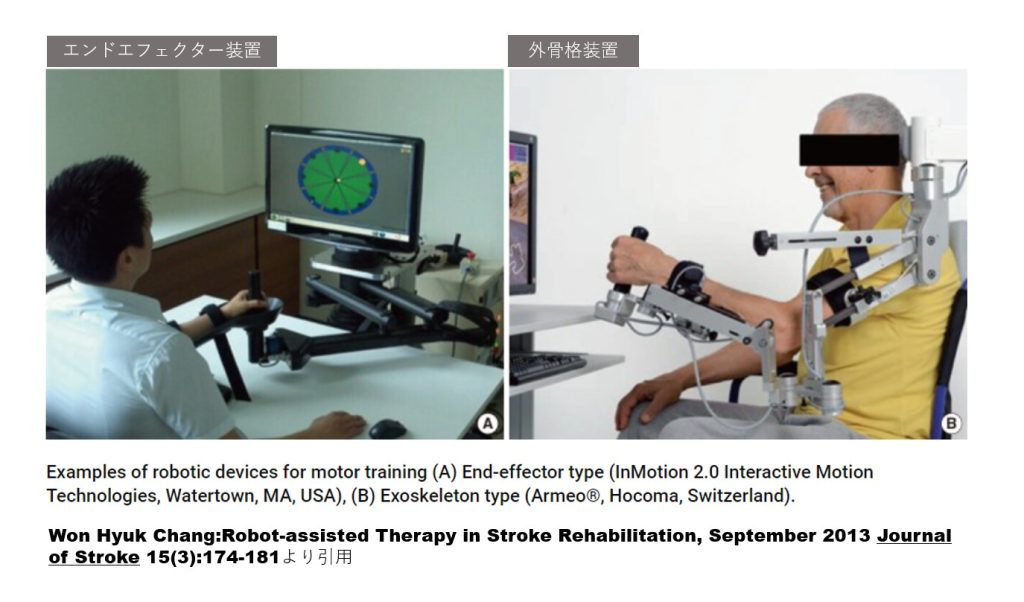
①エンドエフェクター装置は、触覚インターフェースとも呼ばれ、ロボットアームの先端に接続するためのデバイスからなるロボットで、患者がこれらのデバイスを持って環境とコンタクトするように設計されています。
このロボットを用いることで、関節レベルの動きを決めるのは患者自身であることを前提に、日常生活の動作や手の機能を再現する環境を作ることができあます。
エンドエフェクターのメリットは、組み立てが簡単なこと、手の大きさや特徴の違いにわずかな調整で対応できること、右利き・左利きどちらの患者さんにも使用できることなどが挙げられます。
デメリットとしては、これらのロボットは腕の近位関節の制御が限られているため、トレーニング中に異常な動作パターンを確立してしまう可能性があることです。
②外骨格装置は、患者の上肢の解剖学的構造に沿った外付けのサイバネティックデバイスで、いくつかの箇所に取り付けられており、一種の「人工筋肉組織」を構成しています。
外骨格の利点は、ロボット軸が患者の解剖学的軸と一致するため、患部の関節を直接制御でき、代償を最小限に抑えられることです。
一方、デメリットとしては、設計が複雑であること、コストが高いこと、様々な患者のニーズに合わせて調整することが困難であることが挙げられます。
このように2種類のロボットの特性は異なるものの、外骨格やエンドエフェクターを用いたロボット支援型の上肢リハビリテーションの有効性に関する最近の研究では、慢性期の患者において従来の治療と同等以上の手の運動機能の改善が示されていることは強調されています。
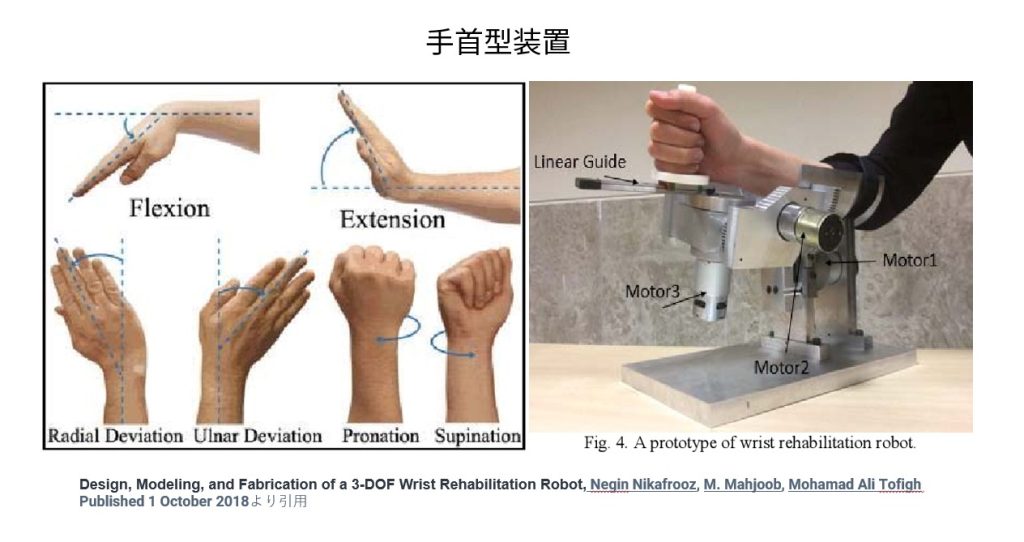
手首の構造は複雑なので、必要な作業に応じて手の方向を調整し、外部環境との相互作用をしながらその位置を固定することが可能です。
運動は一般に、屈曲/伸展と外転/内転の2つの主軸を中心に起こります。回内/回外の動作は、腕の特定の位置で肩の助けを借りて、橈骨-尺骨の複合運動によって行われます。
手首の動きのリハビリテーションの重要性は、Butefischらの研究でも強調されており、脳卒中患者において、患部の手首を繰り返し伸ばす動きは、握力、等尺性伸展、等張性伸展速度などの生体力学パラメータの効率を改善するだけでなく、Rivermead Motor Assessmentで評価した上肢全体の運動機能改善も可能になると述べられています。
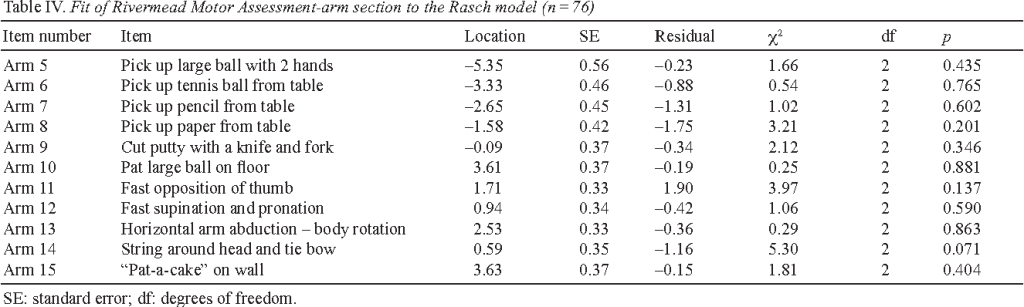
Rivermead Motor Assessment-Arm の一部。ボールを両手で拾う、片手でペンを拾うなど細かな上肢項目があります。こちらより引用
手首型ロボットは、手首の掌屈・背屈、撓屈・尺屈、回内・回外の動作が可能な3自由度の外骨格装置になります。前腕は硬い支持体の中に入っており、患者は手でロボットに接続されたハンドルを握ります。Squeriらの研究では、特に屈曲-伸展、撓屈-尺屈の動作において 手首のROMが改善されることが示されています。
MIT – マヌス 1991年に作られた装置で、当初は肩と肘のためのものでしたが、その後、手首のリハビリテーションとエクササイズ用のモジュールが追加され、内転-外転(30°/30°)、屈曲-伸展(60°/60°)、前屈-上転(70°/70°)の動きができるようになっています。

Squeri Vらは、上記のような異なるデバイスを用いたレビューにおいて、良好な結果が得られています。
実際、ロボットによる手のリハビリテーションは、亜急性期および慢性期の患者の両方において、Fugl-Meyerで測定した運動障害の軽減が認められています。しかし、これらの改善が日常生活で患肢をより多く使用するようになったかどうかは、明らかではないと言わざるを得ません。
ヒューゲルメイヤーを詳しく学びたい方は↓↓↓

さらに、このレビューで明らかになったことは、これらのロボット装置による手のリハビリテーションは、上肢全体の運動機能障害の軽減を可能にしたのに対し、近位四肢のリハビリテーションは、肩と肘にのみ局所的な改善をもたらしたということです。
これらの結果は非常に有望であり、従来は脳卒中後のリハビリの主な目的とは考えられていなかった手のリハビリの重要性を示しています。
しかし、手指のロボット治療の有効性について決定的な結論を出すには、これまで行われた研究が主に小規模なサンプルを用いたパイロットスタディであったため、より広範な臨床研究が必要といえます。さらに、これらの機器を誰もが利用できるようにするためには、小型で使いやすく、安価にすることが必要です。
⑯再生医療など
再生医療に関してはYouTubeで細かく説明しています。ご視聴ください。
手の自主トレ一覧は↓↓↓

参考論文・サイト
Donnan GA et al : Stroke [Seminar]. Lancet, 2008, 371:1612-23
Oujamaa L et al : Rehabilitation of arm function after stroke. Literature review. Annals of physical and rehabilitation medicine. 2009 Apr 1;52(3):269-93.
Pomeroy V et al : Neurological principles and rehabilitation of action disorders: rehabilitation interventions. Neurorehabilitation and neural repair. 2011 Jun;25(5_suppl):33S-43S.
Squeri V et al : Improving the ROM of wrist movements in stroke patients by means of a haptic wrist robot. In2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society 2011 (pp. 1268-1271). IEEE.
Squeri V, Masia L, Giannoni P, Sandini G, Morasso P. Wrist rehabilitation in chronic stroke patients by means of adaptive, progressive robot-aided therapy. IEEE transactions on neural systems and rehabilitation engineering. 2013 Mar 13;22(2):312-25.
Wookyung Park et al : Efficacy of virtual reality therapy in ideomotor apraxia rehabilitation: A case report, 2021 Jul 16;100(28):e26657.
STROKE LABの療法士教育/自費リハビリを受けたい方はクリック
臨床の結果に悩んでいませんか?脳科学~ハンドリング技術までスタッフ陣が徹底サポート
厳しい採用基準や教育を潜り抜けた神経系特化セラピストがあなたの身体の悩みを解決します


1981 :長崎市生まれ 2003 :国家資格取得後(作業療法士)、高知県の近森リハビリテーション病院 入職 2005 :順天堂大学医学部附属順天堂医院 入職 2015 :約10年間勤務した順天堂医院を退職 2015 :都内文京区に自費リハビリ施設 ニューロリハビリ研究所「STROKE LAB」設立 脳卒中/脳梗塞、パーキンソン病などの神経疾患の方々のリハビリをサポート 2017: YouTube 「STROKE LAB公式チャンネル」「脳リハ.com」開設 2022~:株式会社STROKE LAB代表取締役に就任 【著書,翻訳書】 近代ボバース概念:ガイアブックス (2011) エビデンスに基づく脳卒中後の上肢と手のリハビリテーション:ガイアブックス (2014) エビデンスに基づく高齢者の作業療法:ガイアブックス (2014) 新 近代ボバース概念:ガイアブックス (2017) 脳卒中の動作分析:医学書院 (2018) 脳卒中の機能回復:医学書院 (2023) 脳の機能解剖とリハビリテーション:医学書院 (2024) パーキンソン病の機能促進:医学書院 (2025)