


【2026年版】“予測”に用いる情報の違いで姿勢制御は変わるのか?予測的姿勢制御(APA)と脳卒中リハビリを論文から解説【論文レビュー】
時間的予測は、なぜ歩行中の筋反射を速くするのか。
歩行中に支持面が急に動いたとき、私たちはどうバランスをとっているのか。その答えの鍵は「いつ外乱が来るか」を知っているかどうかにあります。Shinya et al.(2016)の研究から、時間的予測情報が腓腹筋の筋反射潜時を短縮するメカニズムと臨床応用を解説します。
要点5項目。
臨床現場でこう出会う。
60代男性、脳卒中後6ヶ月。病棟内歩行は自立しているが、トレッドミル速度変化や不整地で著明にバランスを崩す。
評価すると、「いつ動くか」への備えが乏しく、反応が常に後手に回っていることが示唆される。これが今回紹介する研究のテーマ、時間的予測情報と筋反射の問題です。
歩行中に床面が突然動いたとき、私たちは反射的に姿勢を立て直します。この反応は「速ければ速いほどいい」ように思えますが、実はその速さを決める要因は単純ではありません。
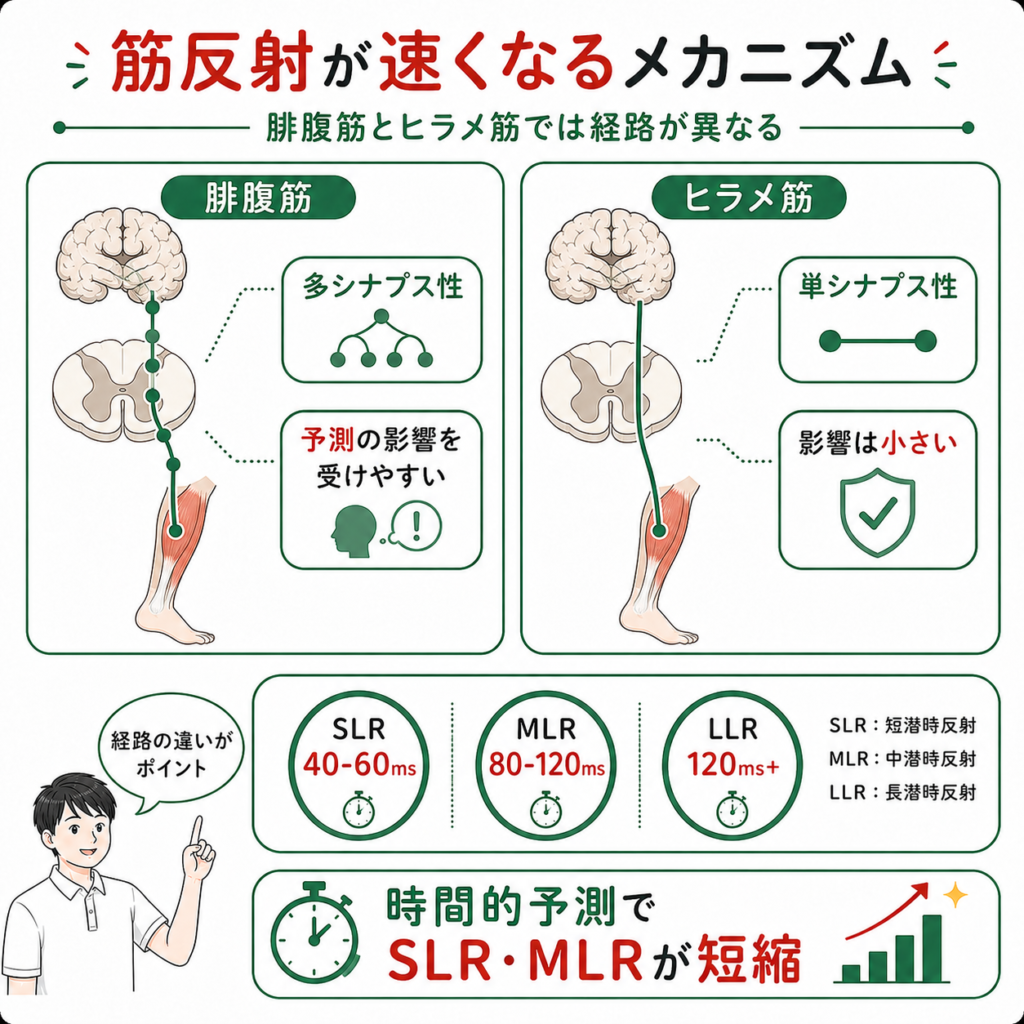
筋反射には短潜時(SLR: 約40〜60ms)・中潜時(MLR: 約80〜120ms)・長潜時(LLR: 約120ms以上)の3相があり、それぞれ異なる神経回路が関与しています。脳卒中後にはこれらの反射特性が変化し、転倒リスクが高まります。
研究の定義と背景。
Shinya M et al.(Front Hum Neurosci. 2016)は、「予測情報」を時間的情報と空間的情報に分類し、それぞれが筋反射にどう影響するかを検討しました。これは当時の姿勢制御研究において新しい切り口でした。
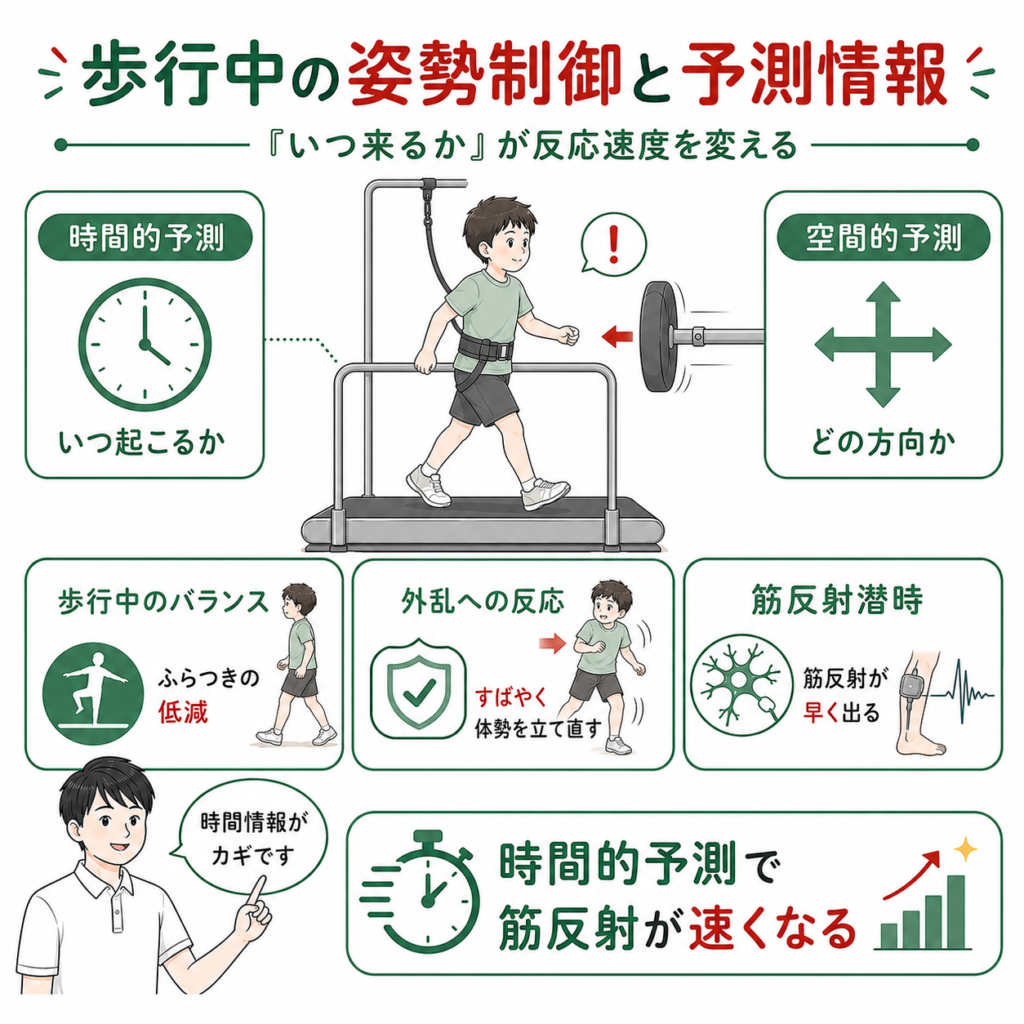
時間的予測情報(Temporal Prior Knowledge):外乱が「いつ」起こるかを事前に知っている状態。例:「次の1歩で速度が変わります」という口頭指示。
空間的予測情報(Directional Prior Knowledge):外乱が「どの方向」に起こるかを事前に知っている状態。例:「前に動きます(加速)」「後ろに動きます(減速)」という情報。
研究が注目された背景
支持面が動揺した際に適切な姿勢戦略をとり転倒を防ぐことは重要な機能です。筋の短・中・長潜時反射は自動的な姿勢反応の一部であり、多様な外乱刺激に対応するための複雑な筋活動パターンとして研究されてきました。
筋の反射には予測情報の影響が大きく、例えばトレッドミル上で予測情報がある場合、急激な加速に対する前脛骨筋の反応が減少することが知られていました。しかし予測情報を時間的・空間的に分類してそれぞれを調べた研究は少なかったのです。

— ご本人・ご家族の状況を丁寧にお伺いします
そのお悩み、一度ご相談ください。
STROKE LABは脳神経系に特化した自費リハビリ施設です。歩行中のバランス・姿勢制御の問題を科学的に評価し、一人ひとりに合ったプログラムをご提案します。まずは無料相談から。
神経メカニズムと筋反射の経路。
腓腹筋の反射弓は介在ニューロンを介した多シナプス性であるのに対し、ヒラメ筋はIa線維から直接α運動ニューロンへつながる単シナプス性(H反射)です。この経路の違いが、上位中枢からの予測・注意情報の影響に差を生みます。
3相の筋反射と予測情報の関係
筋の反射には短潜時反射(SLR)・中潜時反射(MLR)・長潜時反射(LLR)の3相があります。今回の研究では、時間的予測情報があると腓腹筋のSLR・MLRの潜時が短縮し、さらに動揺後の反応全体が早まることが示されました。
| 反射相 | 潜時の目安 | 主な経路 | 予測情報の影響 |
|---|---|---|---|
| SLR(短潜時) | 40〜60 ms | 脊髄反射弓 | 時間的予測で短縮 |
| MLR(中潜時) | 80〜120 ms | 脊髄+上位中枢 | 時間的予測で短縮 |
| LLR(長潜時) | 120 ms 以上 | 大脳皮質ループ | 時間的予測で減弱 |
出典:Shinya M et al. Temporal, but not Directional, Prior Knowledge Shortens Muscle Reflex Latency in Response to Sudden Transition of Support Surface During Walking. Front Hum Neurosci. 2016 Feb 8;10:29.
対象:健常成人11名。トレッドミル上での歩行中に支持面を急加速・急減速させ、下肢筋群のEMGを計測。
統計:一元配置分散分析(通常歩行・catch-trial間の比較)および二元配置分散分析+Bonferroni多重比較。
エビデンスレベル:観察研究(健常者)。脳卒中患者への直接適用は慎重な解釈が必要。
実験方法と条件設定。
実験はトレッドミル上での歩行中に行われました。支持面(トレッドミルベルト)を急加速(Acc)または急減速(Dec)させ、下肢の筋活動(EMG)を計測しています。
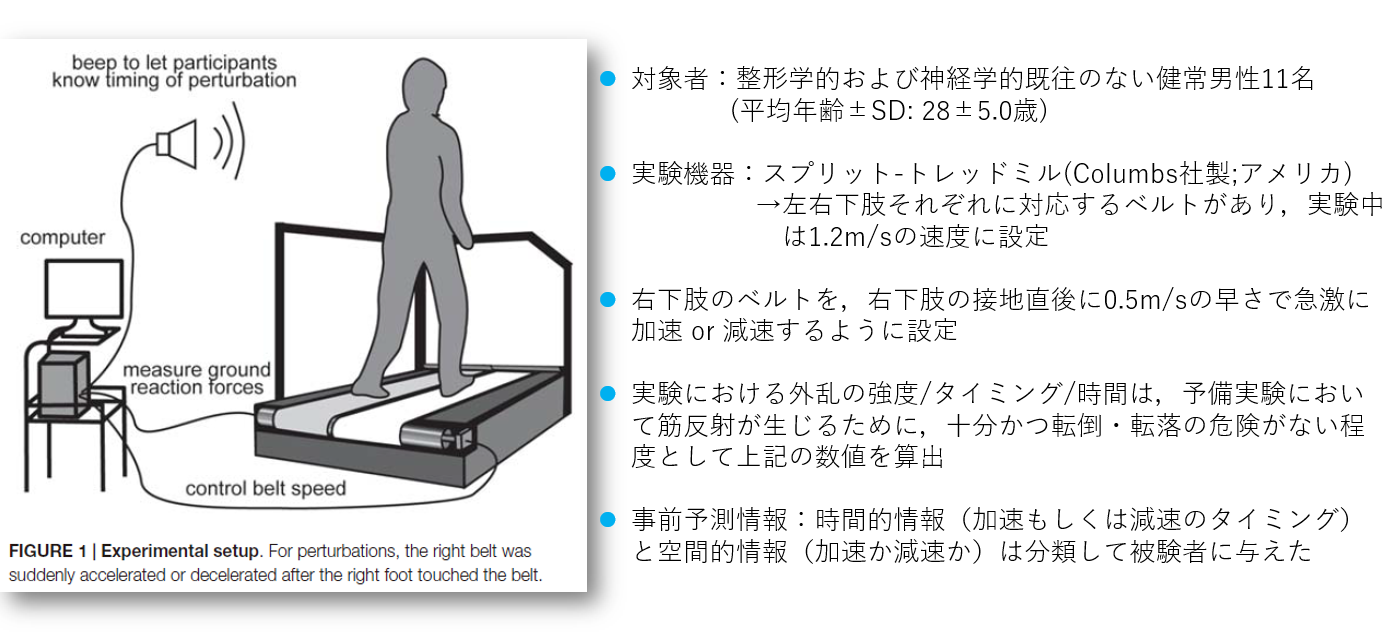
— Fig.1:実験セットアップの概要
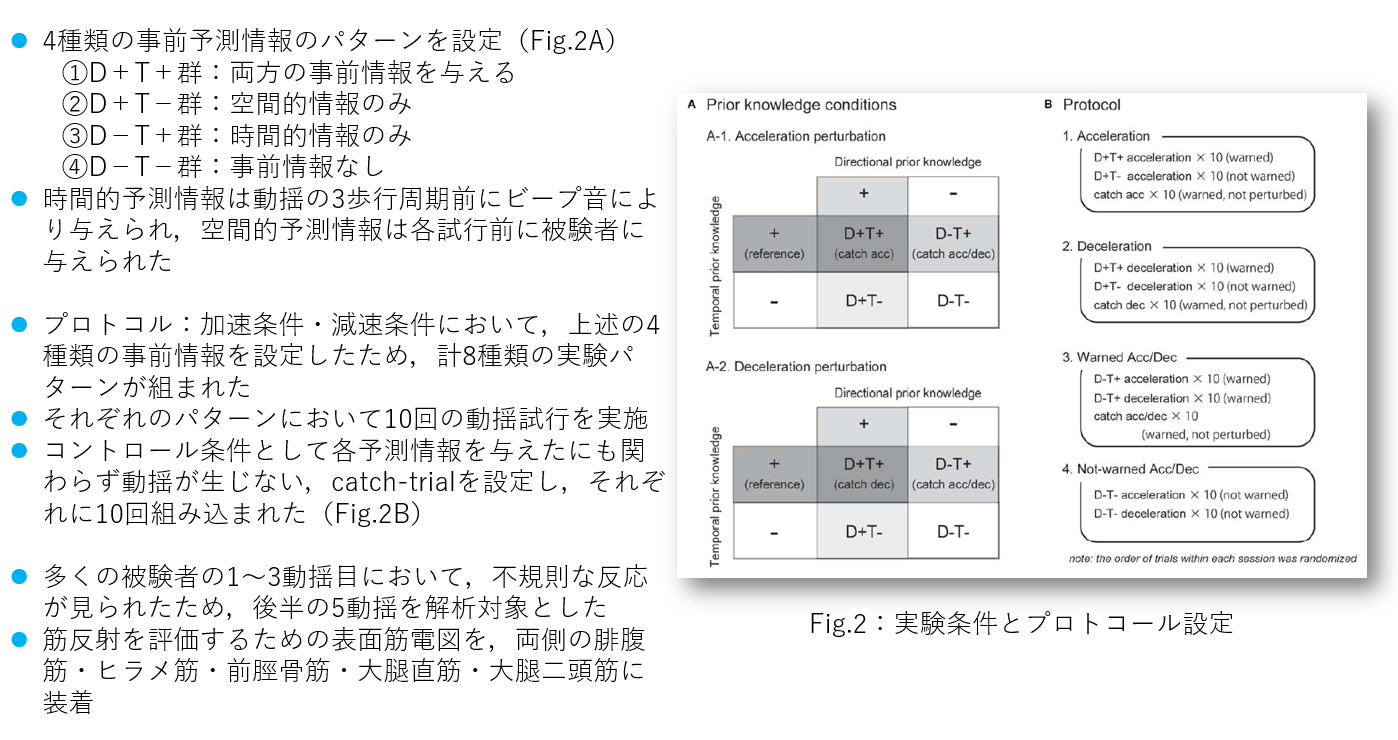
— Fig.2:実験条件(T±D±)の設計
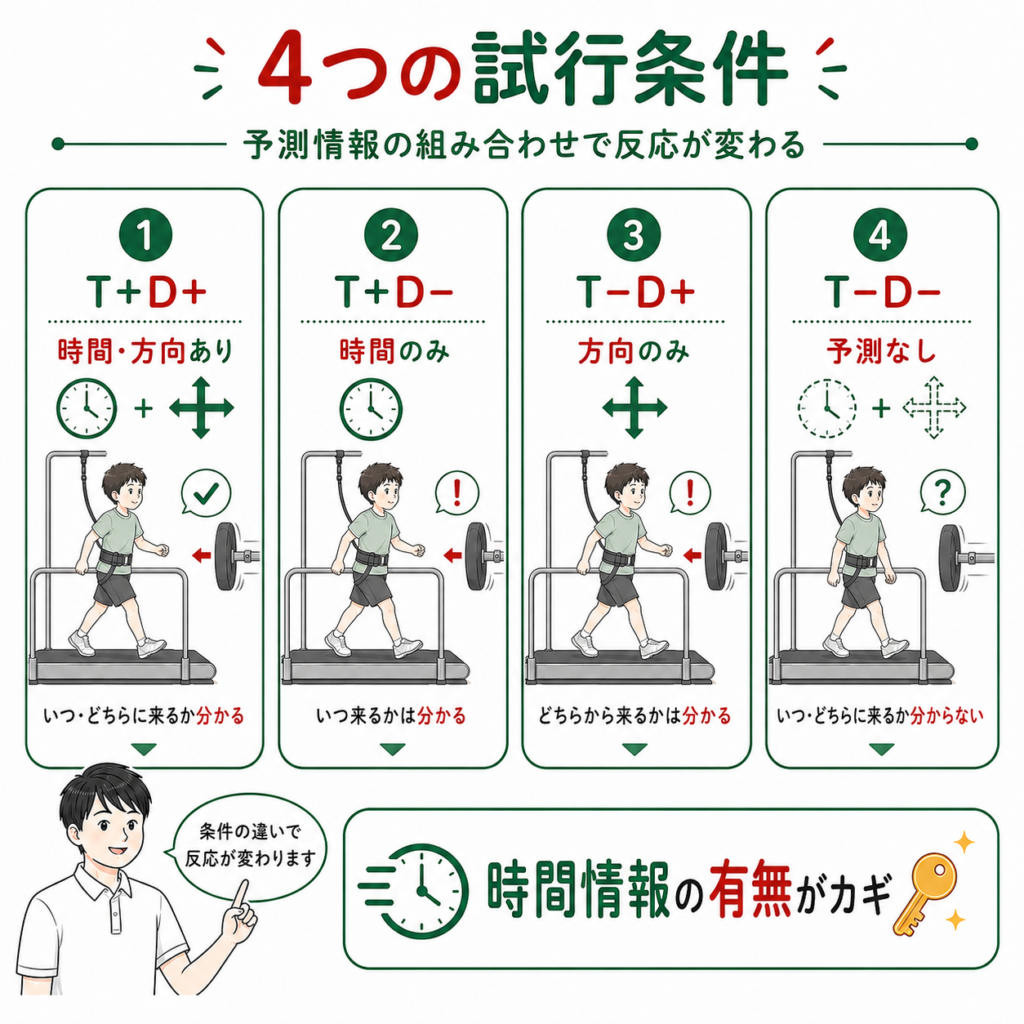
4つの試行条件
いつ外乱が来るかもどの方向かも事前に知っている条件です。最も潜時が短縮し、姿勢戦略が先行して形成されます。
いつ外乱が来るかは知っているが方向は不明です。この条件でも腓腹筋の潜時短縮が認められ、時間情報の重要性を示します。
方向は知っているがタイミングは不明です。空間的情報単独では筋反射潜時への影響は限定的でした。
時間も方向も知らない完全なサプライズ条件です。最も潜時が長く、反応が後手に回ります。臨床では「不意の外乱」に相当します。
主要結果:何が起きたのか。
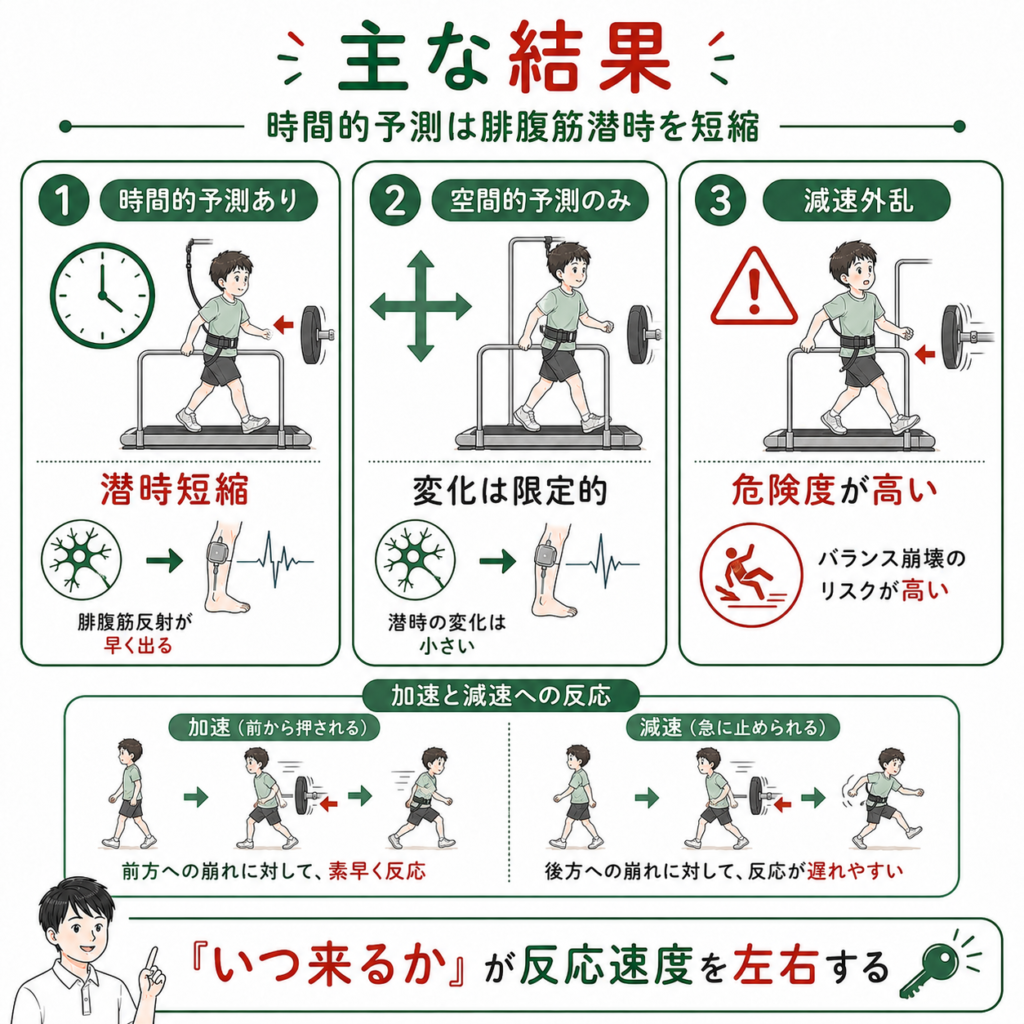
結果は以下の通りです。重要なのは、「時間的情報」と「空間的情報」で筋反射への影響がまったく異なった点です。
加速外乱の場合(Acceleration)
加速が予測されている場合、右下肢の腓腹筋とヒラメ筋の筋活動が減少し、前脛骨筋の活動が増加しました。これは加速方向(前方)への対応として、足関節背屈方向に筋活動が事前に調整されたためです。
時間的予測情報が事前にある場合、腓腹筋の潜時活動が最も影響を受け、潜時が短縮し動揺後の反応が早まりました(Fig.4, 5, 7)。
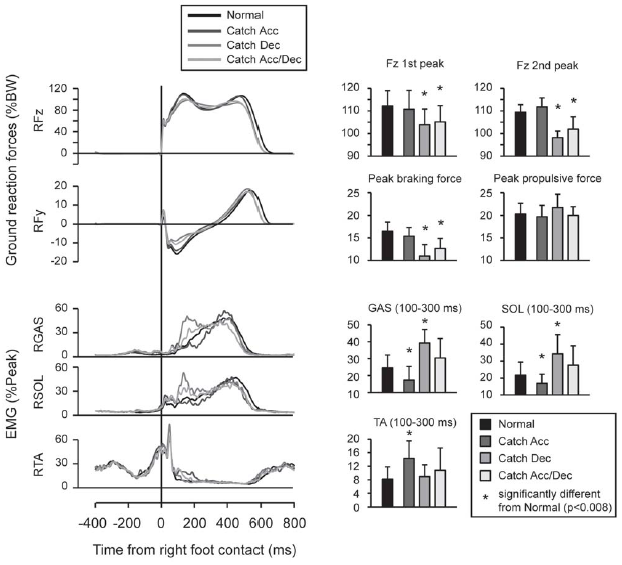
— Fig.3:各筋における筋活動記録。上図をクリックすると原著PDF(PubMed Central)が開きます。その他のFigureは原著PDFをご参照ください。
減速外乱の場合(Deceleration)
減速が予測されている場合、右下肢の腓腹筋とヒラメ筋の活動の増加が見られました(Fig.3)。また床反力の垂直分力の減少(荷重戦略の変更)がキャッチトライアルで観察されました。
減速動揺は進行を阻害する点でバランスを崩しやすく身体への危険度が高いため、被験者が無意識レベルで荷重を回避したと考えられます。減速時には時間的情報があれば長潜時活動(LLR)が減弱されました(Fig.8)。
一方、減速時に前脛骨筋の活動が増加しましたが、事前情報の有無による潜時の変化はありませんでした(Fig.6)。
考察:なぜヒラメ筋は反応しないのか
腓腹筋反射は介在ニューロンを介しているのに対し、ヒラメ筋は単シナプス性の反射です。また両筋は筋長の長さも異なります。このため腓腹筋では潜時短縮が見られても、ヒラメ筋では見られなかったと考えられます。
このメカニズムは被験者の注意の影響が大きいとも考えられており、先行研究においても運動準備は注意現象の一環と表現されているものがあります。ただし注意機能のみでは説明できない点も残っています。空間的予測情報がなく注意が十分に払えない場合でも潜時短縮が見られた点は現在も解明中です。
介入への応用と段階的訓練。
この研究の最大の臨床的示唆は、訓練設計において「時間的予測情報の有無」を意識的に操作できるということです。以下のステップで段階的に難易度を上げていきます。
「次の1歩で前に速くなります」など、タイミングと方向を口頭で告知します。患者が姿勢戦略を意識的に練習できる最も安全な段階です。頻度:10〜15試行/セッション。
「3歩後に外乱があります」とタイミングだけ告知します。方向が不明なため注意の向け方と構えの質が問われます。頻度:セッション内で30〜40%をこの条件に割く。
「今日は減速のみです」と方向だけ伝えます。タイミングは予測できないため、常に備えた歩行が要求されます。歩行環境・速度変化を加えてもよいでしょう。
事前情報なしで外乱に対応します。不整地・混雑した環境・会話しながらの歩行など、デュアルタスクを組み合わせることで実生活に近い状況を作ります。
臨床上、腓腹筋外側および腓骨筋に過負荷がかかり腓腹筋内側の活動が乏しい症例を経験します。上行性・下行性どちらのわずかな指令にも対応できる腓腹筋全体の活性化された状態を作ることが、新たな姿勢戦略の学習に重要です。
単一肢の運動を行う場合でも、他の四肢の位置・姿勢・環境を適切に設定する配慮が必要です。ボディスキーマ(身体の空間的な自己イメージ)と知覚-運動循環の形成を支援しましょう。
Yelnik et al. 2008(Stroke, n=110):脳卒中後のバランス訓練(外乱あり)群は通常訓練群より転倒率が有意に低下。エビデンスレベル:RCT(強く推奨)。
Benaroya-Milshtein et al. 2004(Neurorehabil Neural Repair):APA訓練を週3回・計12セッション実施した群で転倒リスクが30%以上低下。エビデンスレベル:RCT。
訓練パラメータの目安:外乱訓練は10〜20試行/セッション、週2〜3回、4〜8週間継続が多くの研究で採用されています。患者の疲労度・転倒リスクに応じて調整してください。

科学に基づいて設計しています。
STROKE LABでは脳神経科学の知見を活用し、一人ひとりの予測的姿勢制御の問題を評価・介入します。退院後も諦めず、安全に歩ける生活を取り戻しませんか。
多職種連携と環境調整。
歩行中の予測的姿勢制御の問題は、PT・OT・ST・看護師・医師が連携して評価・対応する必要があります。各職種の役割を整理しておきましょう。
| 職種 | 主な役割 | 連携ポイント |
|---|---|---|
| PT(理学療法士) | 外乱刺激訓練・歩行分析・バランス評価 | 訓練難易度を段階的に設計し、他職種と共有 |
| OT(作業療法士) | ADL場面での転倒リスク評価・環境調整 | キッチン・浴室など実生活場面での予測訓練 |
| ST(言語聴覚士) | 注意機能・認知機能の評価 | デュアルタスク訓練の認知負荷設定に貢献 |
| 看護師 | 病棟内の転倒予防・歩行環境の整備 | PTの訓練内容を病棟場面で継続・観察報告 |
| 医師 | 薬剤(鎮静・降圧)の転倒リスク確認 | 訓練強度・活動量の医学的判断・許可 |
環境調整のポイント
「単一肢の運動を行う場合でも、他の四肢の位置や姿勢および環境を適切に設定する配慮が必要です。ボディスキーマの形成を意識してください。」
「病棟では、廊下のどこで速度変化が起きやすいか(曲がり角・病室入口)を看護師と共有しましょう。予測情報を事前に与えることで、訓練効果を日常生活に般化できます。」
「『どこで外乱が起きるか』という空間的情報より、『いつ来るか』という時間的情報を与えることが反射速度の改善に直結します。訓練中の声かけタイミングを工夫しましょう。」
Pitfallsと臨床判断のコツ。
この研究を臨床に応用しようとする際、新人セラピストが特に陥りやすい誤りを3つ整理します。
臨床判断の分岐点
「患者さんがトレッドミルでうまくいっているのに不整地で転倒する場合、実験室条件(時間予測が半ば与えられている)と実生活条件(完全に予測なし)のギャップを疑いましょう。」
「注意機能の低下がある患者さんでは、時間的予測情報を与えても活用できない場合があります。STと連携して注意機能の評価を先に行いましょう。」
「腓腹筋内側の活動が乏しい症例では、まずその部位が動ける環境(荷重量・足部アライメント)を整えてから予測訓練に入るのが順序です。」
予後とゴール設定。
予測的姿勢制御の回復は、脳卒中後の神経回路再編(ニューロプラスティシティ)に依存します。学習可能な時期を逃さず、適切な難易度で繰り返し練習することが重要です。
短期目標(2〜4週):時間・方向ともに事前告知した状況(T+D+)で、外乱後10歩以内にバランスを回復できる。
中期目標(4〜8週):タイミングのみ告知した状況(T+D−)で外乱に対応し、介助なしで歩行継続できる。
長期目標(3ヶ月以降):予告なし(T−D−)の不整地・混雑環境でも転倒なく屋外歩行できる。
よくある質問。
時間的予測情報とは、外乱(床面の動揺など)がいつ起こるかを事前に知っている状態のことです。空間的予測情報(どの方向に動くか)とは区別されます。
本研究では、時間的予測情報があると腓腹筋の筋反射潜時が有意に短縮することが示されました。
ヒラメ筋は単シナプス性の反射(Ia線維→脊髄→α運動ニューロン)であるのに対し、腓腹筋反射は介在ニューロンを介した多シナプス性の経路をとります。
このため腓腹筋はより高次の予測・注意機構の影響を受けやすく、時間的予測情報による潜時短縮が腓腹筋に選択的に現れたと考えられます。
脳卒中後は大脳皮質の運動前野や補足運動野の損傷により、予測的姿勢調節(APA:Anticipatory Postural Adjustment)が障害されます。
その結果、外乱刺激に対する反応が遅れバランス保持が困難になります。訓練では外乱の時間・方向を段階的に予測させるアプローチが有効です。
まず口頭合図(「次の1歩で段差があります」)で時間的予測を与え、徐々に予告なしの状況へと移行します。
加速・減速・側方外乱の方向と時間を組み合わせながら難易度を上げることで、無意識レベルの姿勢戦略の学習を促せます。四肢の位置や環境設定にも配慮し、ボディスキーマ形成を支援します。
腓腹筋外側や腓骨筋に過負荷がかかり腓腹筋内側の活動が乏しい症例では、まず上行性・下行性どちらの指令にも対応できる腓腹筋全体の活性化状態を作ることが優先されます。
単一肢の運動中も他の四肢の位置・姿勢・環境を適切に設定し、知覚-運動循環を整えることが重要です。
被験者が11名と少数であること、トレッドミル上での実験であり実際の路面歩行と条件が異なること、下肢以外の筋活動を測定していないため体幹・上肢の貢献が不明であること、の3点が主な限界です。
健常者データであるため脳卒中患者への直接適用には慎重な解釈が必要です。
STROKE LABのプログラム。
STROKE LABは脳神経系に特化した自費リハビリ施設です。脳卒中後の歩行・バランス・転倒予防の問題に対して、最新の神経科学的知見をもとに個別プログラムを設計しています。

— STROKE LABでの歩行リハビリの実際の様子です。
「歩行訓練で意外と見落とされがちなのが、声かけのタイミングです。”どこに気をつけて”より”いつ来るか”を伝えるだけで、患者さんの反応が変わることを何度も経験しています。」— 理学療法士・経験12年・神経リハビリ専門
「腓腹筋の過緊張や内側の弱さが問題になる症例では、まず足部アライメントと荷重環境を整えます。筋が動ける状態になってはじめて、予測的な反応訓練が活きてくる。そこを焦らないことが大切です。」— 理学療法士・経験15年・脳卒中リハビリ専門
あわせて読みたい:【2026年版】姿勢制御とは?感覚入力・姿勢安定性・オリエンテーションのメカニズムから脳卒中片麻痺リハビリまで徹底解説
諦めないでください。

退院後に「もうこれ以上は回復しない」と言われた方が、私たちのもとへ来られることがあります。でも、脳神経系のリハビリはまだ終わっていません。
歩行中のバランスや転倒への恐れは、正しい評価と適切なアプローチによって、確実に改善できるケースがあります。
STROKE LABでは、一人ひとりの神経系の状態を丁寧に評価し、科学的根拠に基づいたプログラムをご提供しています。まずは無料相談からお気軽にご連絡ください。
代表取締役 金子 唯史
参考文献。

1981 :長崎市生まれ 2003 :国家資格取得後(作業療法士)、高知県の近森リハビリテーション病院 入職 2005 :順天堂大学医学部附属順天堂医院 入職 2015 :約10年間勤務した順天堂医院を退職 2015 :都内文京区に自費リハビリ施設 ニューロリハビリ研究所「STROKE LAB」設立 脳卒中/脳梗塞、パーキンソン病などの神経疾患の方々のリハビリをサポート 2017: YouTube 「STROKE LAB公式チャンネル」「脳リハ.com」開設 2022~:株式会社STROKE LAB代表取締役に就任 【著書,翻訳書】 近代ボバース概念:ガイアブックス (2011) エビデンスに基づく脳卒中後の上肢と手のリハビリテーション:ガイアブックス (2014) エビデンスに基づく高齢者の作業療法:ガイアブックス (2014) 新 近代ボバース概念:ガイアブックス (2017) 脳卒中の動作分析:医学書院 (2018) 脳卒中の機能回復:医学書院 (2023) 脳の機能解剖とリハビリテーション:医学書院 (2024) パーキンソン病の機能促進:医学書院 (2025)