


【最新版】ロボットリハビリによる歩行訓練の効果と展望を解説/療法士向け脳卒中論文サマリー

概要

引用元:researchforecast.com
ロボット技術の進歩は、療法士やリハビリテーションにとって新たなチャンスをもたらします。特に、神経損傷後の歩行の回復など下肢のリハビリテーションには、療法士が多大な時間と体力を費やす必要がある場合があります。
下肢のリハビリテーションのために設計されたロボットデバイスは、関節の動きをサポートするコンピュータ制御のモーターを搭載した動力装具で、運動トレーニングの治療量を増加させ、セラピストの負担を軽減できる可能性があります。
特定の動作(例:歩行周期)の繰り返しを増やすことに加えて、ロボット工学が治療に役立つと考えられる他の理由として、動作の質(例:速度、方向、振幅、シーケンス)のモニタリングと制御、動作中の感覚的フィードバックの提供、制御摂動のための安全環境の提供、最小限の労力での体重支持、より信頼できる標準化テストと可動域測定への可能性などが挙げられます。
リハビリテーションにおけるロボティクスの使用は、以下のような多くの患者集団にメリットがある可能性があります。
●脊髄損傷
●脳卒中
●脳性麻痺
●パーキンソン病
●多発性硬化症(MS)
●外傷性脳損傷
など
近年では、廃用症候群の患者や肥満患者はじめ適応の幅を広げてきています。疾患に対してというよりも、機器を用いて何をサポートしたいのかを考えることが大事です。
下肢ロボットを使用する目的
歩行は、下肢ロボットリハビリテーションの最も明白な意義の1つです。現在の歩行改善方法では、最大の効果を得るために、患者が各関節や脚を適切に動かせるように、複数のセラピストが必要です。これはリハビリにとって高価で、その後非現実的なアプローチであるだけでなく、このケアを提供するセラピストにとっても非常に労力のかかることです。
ロボット工学を使用することにより、同じ機械的な治療を行うのにセラピストの負担を減らすことができます。患者はロボット装置に固定され、セラピストは監督と装置のセッティングだけを行います。こうすることで、患者に最初から適切な歩行技術を教えることができ、不適切な歩行パターンを回避することができるかもしれません。
リハビリテーションにロボット工学を活用する例として、あまり知られていないのが、その評価能力です。リハビリの分野では、機械やレセプター(EMG、フォースプレートなど)が長年使用されてきましたが、その主な目的は、生のデータを収集することだけでした。
適切なロボットを使用すれば、関節角度、速度、振幅などの測定値を簡単に観察し、記録することができます。この情報は、治療計画中に患者がどのような進歩を遂げることができるかを示す成果指標として使用することができます。
ロボット工学が患者を支援するもう1つの方法は、関節インピーダンスの低減による可動域(ROM)の改善です。関節インピーダンスの構成要素である受動的抵抗や反射的抵抗は、関節の制限がどのように生じているかを判断することができます。そして、ロボット工学は、患者さんの個々のニーズに基づいて、正確な速度と振幅の量を適用することができます。これは、特定の時間に適用される正確な力を使用してROMを改善するのに役立つ可能性があります。
関節のROMを改善するために、通常、持続的な受動運動装置が使用されます。しかし、最新のマシンを使用すれば、理論的には、患者の快適さと安全性を確保しながら、より速い速度でROMを改善することができます。
また、ロボティクスは、患者の下肢の固有感覚を改善し、判断するために使用することができます。患者が閉眼すると、機械が患者の手足をある位置に動かすようにセットアップすることができます。その後、患者に手足の位置を考えてもらい、機械の位置と一致させます。これにより、患者は手足の位置に集中することができ、反対側の手足も同じような位置に置くことができます。
ロボット工学を用いて、手足の微細な受動的な動きを検出することができます。このテストでは、患者は目を閉じたままで、手足を固定した状態で、ロボットがゆっくりと少しずつ動かします。患者が手足の動きを感じたら、声を出します。これにより、患者が感じることができる動きの大きさが決まります。
治療のサインとしてだけでなく、正確な評価ツールとしても活用できます。これらは、下肢のリハビリテーションにおけるロボット治療の意義の一部に過ぎませんが、ロボット産業は、患者のケアを向上させる多くの機会を持つ成長分野なのです。時間の経過と研究により、ロボット産業が下肢のリハビリテーションに及ぼす影響は、今後も発展していくことでしょう。
下肢ロボットのその他の効果とは
下肢ロボットの長期的な使用は、以下をもたらす可能性があります。
●下肢の筋力向上
●姿勢の改善
●骨密度の増加
●便通の改善
●睡眠の改善
●痛みの減少
●コレステロールの減少
●痙性の低下
●心血管疾患の発症率低下
●糖尿病の発症率減少
など
心理的な配慮 テクノロジーを治療に取り入れる場合、患者のモチベーションと関与は、患者の成功と肯定的な結果にとって非常に重要です。ロボットデバイスを積極的に導入することで、継続的な使用が可能になり、患者のモチベーションと関与を高めることができます。
一方、ネガティブな体験は、モチベーションの低下やデバイスを活用することによる治療成果の減少につながる可能性があります。そのため、療法士は患者が治療に使う機器の使い方を学んでいる間、適切な指示とフィードバックを提供することで、大きな役割を果たします。
従来、下肢のリハビリテーションにロボット機器を使用することが、患者の気分やモチベーションに与える影響について調査した研究はほとんどありません。初期の定性的研究では、リハビリテーションにロボット外骨格を取り入れることに患者が肯定的な見方をしていることが分かっています 。また、治療者がロボット技術を診療に使用することを受け入れ、望むかどうかを考慮することも重要であり、それは、装置の操作に慣れるための学習曲線と理学療法の成果をサポートする科学的根拠の芽生えによって異なります。
下肢ロボティクスの限界と課題
下肢のリハビリテーションにロボットを使用することの潜在的な利点は明らかですが、克服しなければならない多くの課題があり、さらなる研究が必要です。
現時点での主な課題は、ロボットシステムの購入と使用にかかる高いコスト、患者の改善に関する高い臨床エビデンスの欠如、治療プロトコルと評価のための標準化された尺度の必要性です。
その他の制限としては、サイズが大きいこと、移動式ユニットで内部電源の持続時間がないことが挙げられます。また、痙縮のある患者にはロボット動作が引き金となり、歩行時間が長くなることで骨折、擦り傷、褥瘡、転倒のリスクが高まるなどの悪影響が懸念されます。
特に心臓疾患のある患者に関しては、心臓の蘇生が必要なときやその他の緊急事態のときに、患者がアクセスできないため、これらの機械に縛り付けられることも危険です。
ロボットシステムは、運動学的および動的な値を正確に測定する能力を有しており、人為的な誤差よりもはるかに信頼性が高く、評価目的のために非常に有用である可能性を秘めています。
しかし、このデータを有用にするには、標準化された手順やプロトコルを開発する必要があります。現在、ロボティクスシステムが評価時に使用するデータの例として、ROM、歩行距離、歩行速度、その他様々な動的指標がありますが、他の歩行関連評価(Barthel Index、Dynamic Gait Indexなど)で見られるような評価のための標準的な指標はまだ存在しません。
さらに、ロボット工学の有効性は、療法士が提供する典型的な手動の療法よりも非常に優れていることが示されておらず、これが通常の診療にまだ導入されていない理由の原動力となっています。
リハビリテーションにおけるロボティクスの例
 引用元:インターリハ株式会社
引用元:インターリハ株式会社
下肢のロボットデバイスはすでにいくつか市販されており、その他にも多くのものが開発されています。歩行リハビリテーション用のロボットデバイスの例を以下に示すが、これらは異なるカテゴリに分類されます。
外骨格型ロボット、体重支持トレッドミル(BWST)外骨格デバイス、およびデバイス用エンドエフェクタです。
外骨格型ロボットは、頭上の支持システムなしで患者が歩行することを可能にします。ただし、一般的に、患者は装置と共同で補助装置(例えば、前腕松葉杖)を使用するためにある程度の上肢の強さを有する必要があることがあります。
BWSTT 外骨格は、患者の体重の一定割合を支えるハーネスを含み、ロボット装具は、歩行中の股関節、膝、および/または足首の運動パターンを制御します。
エンドエフェクタ装置も、ハーネスを使用して体重をある程度支えますが、装具の代わりに、一般に、患者の足と足首を、歩行の軌道を模倣したフットプレートに縛り付けます。
ロボティクスの将来
リハビリテーションロボットの進歩は、療法士による患者への治療方法を一変させる可能性を秘めています。最終的な目標は、療法士がロボットを使って評価や治療の効果を高め、診療に役立てられるようになることです。
療法士や長期のリハビリテーションに対する需要が高まっているため,現在のロボット開発の主な目標の1つは,IT技術をリハビリテーションロボットと組み合わせて,インターネット経由で評価と治療を行い、理学療法士が患者の自宅で快適に治療を監督し、1人の理学療法士が多数の患者を同時に診察できるようにすることです。
現在の歩行ロボットは、ランニングやジャンプのようなリハビリに必要なパワーや力を生み出すことができません。しかしその分野の開発が進めば、脊髄損傷のリハビリに取り組むアスリートにとって役立つことが期待されます。
また、バッテリーは、寿命、サイズ、重量、充電のしやすさを最大限に高めるために、さらに開発が進められています。現在、ロボット技術で注目されている他の分野には、軽量化技術の開発や店頭で利用できる機器の実現、そして患者のモチベーションを最大化するためのバーチャルリアリティとビデオゲームの組み合わせなどがあります。
youtube動画プッシャー症候群に役立つ動画を解説しています
カテゴリー
バイオメカニクス
タイトル
Effects of the Abdominal Drawing-in Maneuver and the Abdominal Expansion Maneuver on Grip Strength, Balance and Pulmonary Function in Stroke PatientsMi-Ra Yoon, Ho-Suk Choi, Won-Seob Shin J Kor Phys Ther 2015:27(3):147-153
なぜこの論文を読もうと思ったのか?
・プッシャー症候群について調べていたところ、ロボットを使用した論文があったため興味を持った。
内 容
背景
・プッシャー行動は、一部の脳卒中患者によって示される重度の姿勢障害であり、空間における体の向きの認識の変化を反映している。
・プッシャー行動を有する患者は、典型的には、彼らの非麻痺性の身体側から押しのけ、さらに非麻痺側へ体重を移そうとするいかなる試みにも抵抗する。
・プッシャー行動は脳卒中リハビリテーション患者の10%から18%にみられ、治療を妨げリハビリテーションの過程を長引かせる。
・これまでのプッシャー行動に対するリハビリテーションでのアプローチは、さまざまな形のフィードバック訓練、たとえば、視覚的な合図等に焦点を当てていた。
・しかし、フィードバックトレーニングの有効性に関する証拠は不十分であり、患者は自発的に手がかりを使用することができない。
・他の研究では、視覚的フィードバック要素、電気的前庭刺激、ロボット支援歩行訓練(RAGT)を用いた単一セッションの理学療法の即時効果を比較している。
・RAGTのセッションの後、患者は理学療法と比較して統計学的に有意な減少行動促進を示しましたが、電気的前庭刺激は統計的に有意な改善は見られなかった。
・ 歩行中の直立体位の強制制御は、プッシャーの行動を即座に軽減するための効果的な方法である。
方法
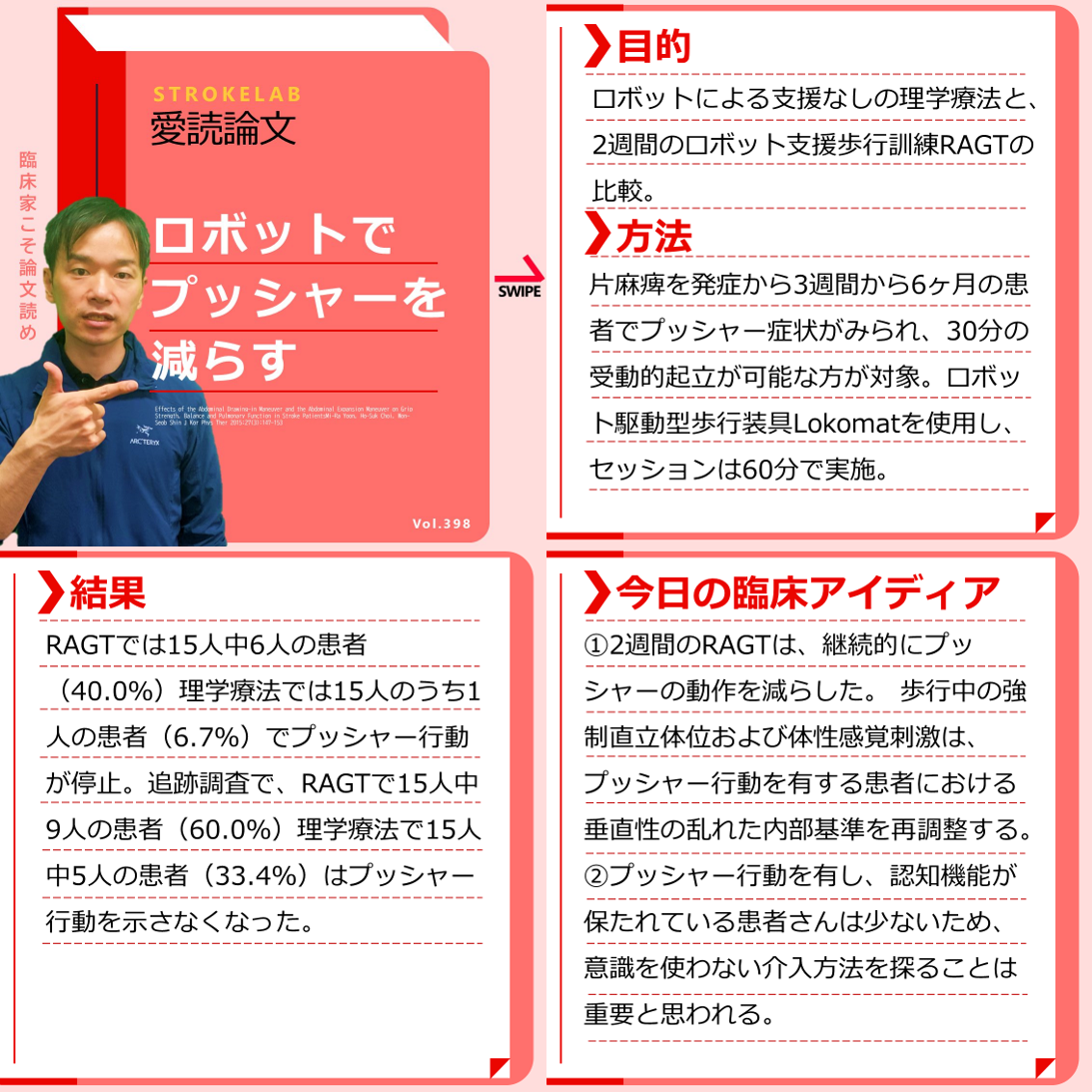
・ロボットによる支援なしの理学療法と、2週間のRAGTの比較。
・片麻痺を発症から3週間から6ヶ月の患者を対象に実施。
・被験者は18〜90歳、プッシャー症状がみられ、30分の受動的起立が可能な方が対象。
・ロボット駆動型歩行装具Lokomatを使用し、セッションは60分。
※ Lokomatは、股関節と膝関節を直線的に駆動する外骨格で、参加者の足をあらかじめ定義された軌跡に沿って誘導することで、トレッドミルでの歩行を支援します。伸縮性のあるストラップを使用して、参加者の足を受動的に持ち上げ、足が落ちないようにします。
結果
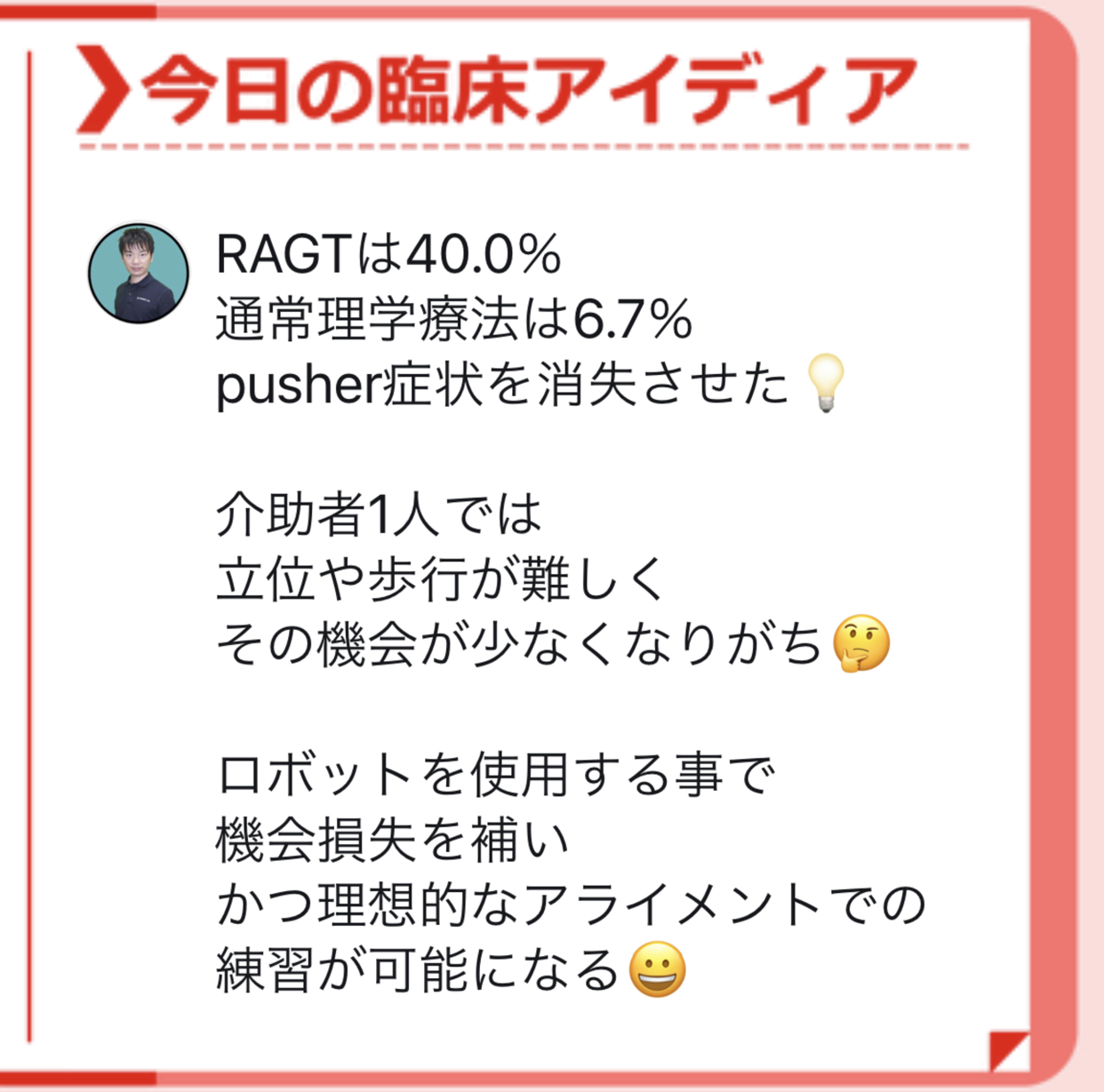
・RAGTでは15人中6人の患者(40.0%)理学療法では15人のうち1人の患者(6.7%)で行動が停止。
・追跡調査で、RAGTで15人中9人の患者(60.0%)理学療法で15人中5人の患者(33.4%)はプッシャー行動を示さなくなった。
・RAGTは、理学療法よりも有意に大きい長期効果をPerformance-Oriented Mobility Assessment(POMA)で示しました。
考察
・RAGTは、麻痺肢に体重をかけると同時に非麻痺脚を周期的なパターンで動かすことを学習できる。また、意識的な関与を最小限にしか使用しない。
・プッシャー行動を示す患者はしばしば重度の症状を示すため、視覚的フィードバック療法が実行不可能である。
・2週間のRAGTは、継続的にプッシャーの動作を減らした。 歩行中の強制直立体位および体性感覚刺激は、プッシャー行動を有する患者における垂直性の乱れた内部基準を再調整する。
私見・明日への臨床アイデア
・プッシャー行動を有し、認知機能が保たれている患者さんは少ないため、意識を使わない介入方法を探ることは重要と思われる。
・RAGTのようなロボットもより多くの病院に導入されることも重要だが、提供できるセラピストが病態を十分理解することも大切である。
脳卒中の動作分析 一覧はこちら 論文サマリー 一覧はこちら 脳卒中自主トレ100本以上 一覧はこちら
塾講師陣が個別に合わせたリハビリでサポートします


1981 :長崎市生まれ 2003 :国家資格取得後(作業療法士)、高知県の近森リハビリテーション病院 入職 2005 :順天堂大学医学部附属順天堂医院 入職 2015 :約10年間勤務した順天堂医院を退職 2015 :都内文京区に自費リハビリ施設 ニューロリハビリ研究所「STROKE LAB」設立 脳卒中/脳梗塞、パーキンソン病などの神経疾患の方々のリハビリをサポート 2017: YouTube 「STROKE LAB公式チャンネル」「脳リハ.com」開設 2022~:株式会社STROKE LAB代表取締役に就任 【著書,翻訳書】 近代ボバース概念:ガイアブックス (2011) エビデンスに基づく脳卒中後の上肢と手のリハビリテーション:ガイアブックス (2014) エビデンスに基づく高齢者の作業療法:ガイアブックス (2014) 新 近代ボバース概念:ガイアブックス (2017) 脳卒中の動作分析:医学書院 (2018) 脳卒中の機能回復:医学書院 (2023) 脳の機能解剖とリハビリテーション:医学書院 (2024) パーキンソン病の機能促進:医学書院 (2025)